Robot Arm Illustrator
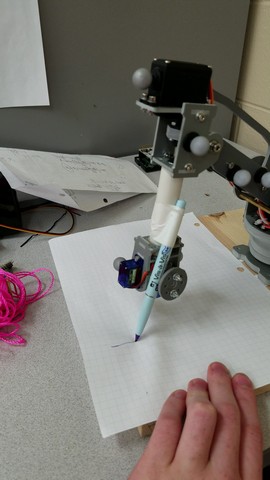
In developing coursework for University of Wisconsin’s “ME 439: Introduction to Robotics” class, I used an à la mode board which interfaces well with a Raspberry Pi and has headers available for stepper motor control. The goal was to take a picture drawn in a vector drawing program like Inkscape and have the arm draw the same image. Using Python, I parsed SVG output files into a trajectory and programmed a controller that moved the arm via inverse kinematics. I never really got a consistent drawing because the stepper motors had low resolution and the robots linkages weren’t very rigid.